from the video BITE, it will send a power supply
malfunction signal to the IRDSC to light the power
supply fail light.
BITE logic also monitors incoming signals from
the receiver-converter and control servomechanism.
The logic module will initiate signals to the IRDSC to
operate the various indicator lights based on these
signals.
CONTROL SERVOMECHANISM
ASSEMBLY
The control servomechanism assembly processes
line-of-sight (LOS) position and rate commands from
the IRDSC, the target tracking sight control (TTSC),
or the aircraft computer.
The source of these
commands depends upon which operational mode the
system is operating in. These commands are
processed as analog drive signals for slewing
(steering) the receiver-converter drive motors and
gimbals to position the receiver head. Functionally,
the control servomechanism assembly breaks down
into four subsystems. These are the power supply,
azimuth drive, elevation drive, and the BITE
subsystems.
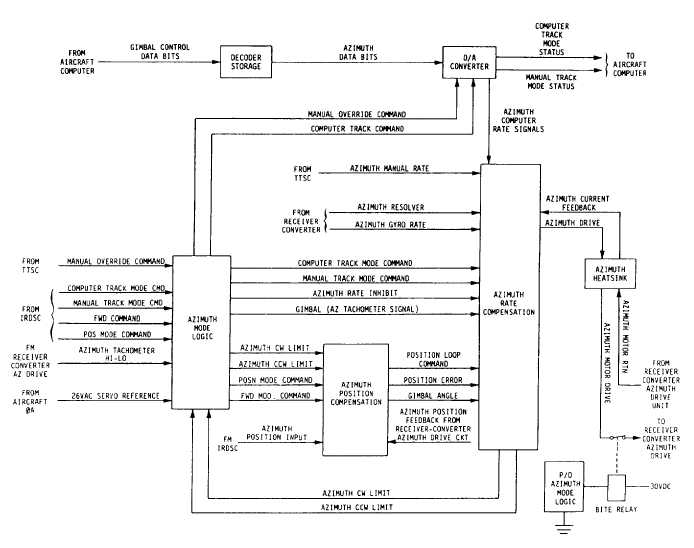
The azimuth and elevation drive signals are
processed simultaneously in a given module. For
simplicity, we will discuss each subsystem separately.
Notice the modules are labeled in their respective
block diagrams as azimuth (fig. 6-21) or elevation
(fig. 6-22) as appropriate. Keep in mind that, in
actual practice, a module (such as mode logic) is
Figure 6-21.-Azimuth drive subsystem block diagram.
6-18