COMPENSATION
Regardless of its source, strength, or direction,
any magnetic field may be defined in terms of three
axial coordinates. That is, it must act through any or
all of three possible directions—longitudinal, lateral,
or vertical—in relation to the magnetometer detector.
Compensation for magnetic noises is necessary to
provide a magnetically clean environment so that the
detecting system will not be limited to the magnetic
signal associated with the aircraft itself.
Experience has shown that the induced fields and
eddy current fields for a given type of aircraft are
constant. That is, from one aircraft to another of the
same type, the difference in fields is negligible.
These fields may be expected to remain constant
throughout the life of the aircraft, provided significant
structural changes are not made. In view of these
factors, it is present practice for the aircraft
manufacturer to provide compensation for induced
fields and eddy current fields.
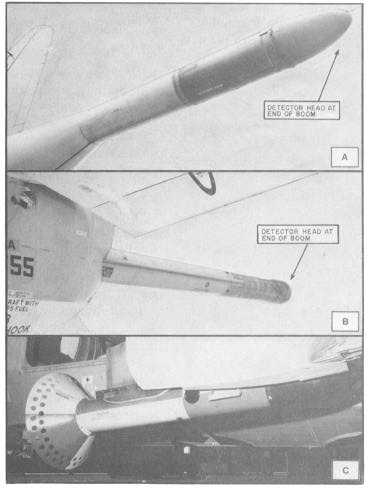
Eddy current field compensation is usually
achieved by placing the magnetometer (detecting
head) in a relatively quiet magnetic area. In some
aircraft the detecting head is placed at least 8 feet
from the fuselage. This is done by enclosing the
detecting head in a fixed boom (fig. 4-24, view A), or
in an extendable boom (fig. 4-24, view B).
Helicopters tow the detecting head by use of a cable
(fig. 4-24, view C).
Induced magnetic field compensation is
accomplished by using Permalloy strips. The aircraft
is rotated to different compass headings, and the
magnetic moment is measured. The polarity and the
variation of the magnetic moment are noted for each
heading, and Permalloy strips are oriented near the
detector magnetometer to compensate for field
changes due to aircraft rotation. Additional
232.179
Figure 4-24.—A. Stationary detector boom. B. Extendable detector boom. C. Cable-deployed towed detector.
4-19