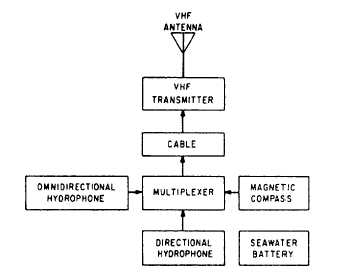
the passive directional sonobuoy (fig. 4-31), DIFAR
operates by detecting directional information, and
then frequency multiplexing the information to the
acoustic data. This signal is then transmitted to the
aircraft where it is processed and the bearing is
computed. Subsequent bearing information from the
buoy can be used to pinpoint, by triangulation, the
location of the sound or signal source.
Active Sonobuoy
The active sonobuoy is either self-timed (the
sonar pulse is generated by the buoy at a fixed pulse
length and interval) or command actuated. The
command activated buoy is controlled by a UHF
command signal from the aircraft. An active
sonobuoy uses a transducer to radiate a sonar pulse
that is reflected back from the target. The time
interval between the ping (sound pulse) and the echo
return to the sonobuoy is measured. Taking the
Doppler effect on the pulse frequency into con-
sideration, this time-measurement data is used to
calculate both range and speed of the submarine
relative to the sonobuoy.
RO SONOBUOYS.— Self-timed active sonobuoys,
known as range-only (RO) sonobuoys, are set to ping
for a limited period, starting from the time they are
deployed. These buoys will provide information on
range of targets only.
CASS SONOBUOYS.— The command activated
sonobuoy system (CASS) allows the aircraft to
deploy the sonobuoy, but the buoy will remain passive
until commanded to ping. This allows the aircraft to
surprise the submarine.
DICASS SONOBUOY.— The addition of a
directional hydrophone turns the CASS sonobuoy into
a DICASS buoy. A DICASS sonobuoy allows the
aircraft acoustic analysis equipment to determine the
range and bearing to the target with a single
sonobuoy. DICASS sonobuoys are replacing the RO
and CASS sonobuoys.
Special-Purpose Sonobuoys
There are three types of special-purpose
sonobuoys in use today. These are the BT, SAR, and
the ATAC sonobuoys.
These sonobuoys are not
designed for use in submarine detection or
localization.
Figure 4-31.-Block diagram of the DIFAR sonobuoy.
BATHYTHERMOBUOY.— The bathythermo-
buoy (BT) is used to measure water temperature
versus depth. The water depth is determined by
timing the descent of a temperature probe. Once the
BT buoy enters the water, the probe descends
automatically at a constant 5 feet per second.
The probe uses a thermistor, a temperature-
dependent electronic component, to measure the
temperature. The electrical output of the probe is
applied to a voltage-controlled oscillator. The
oscillator’s output signal frequency modulates the
sonobuoy transmitter. The frequency of the
transmitted signal is linearly proportional to the water
temperature. The water temperature and depth are
recorded on graph paper that is visible to the ASW
operator. The sonobuoy signal is processed by the
acoustic equipment on board the aircraft.
SAR BUOY.— The search and rescue (SAR)
buoy is designed to operate as a floating RF beacon.
As such, it is used to assist in marking the location of
an aircraft crash site, a sunken ship, or survivors at
sea. The buoy can be launched from aircraft equipped
to launch sonobuoys or deployed over the side by
hand. Nominal RF output is 1 watt for 60 hours on
sonobuoy channel 15 (172.75 MHz). A floating
microphone is provided for one-way voice communi-
cation. The RF beacon radiates automatically and
continuously, regardless of whether the microphone is
used.
A flashing light and dye marker are
incorporated in the buoy. The buoy also has an 8-foot
tether line for attaching the buoy to a life raft or a
person.
4-26