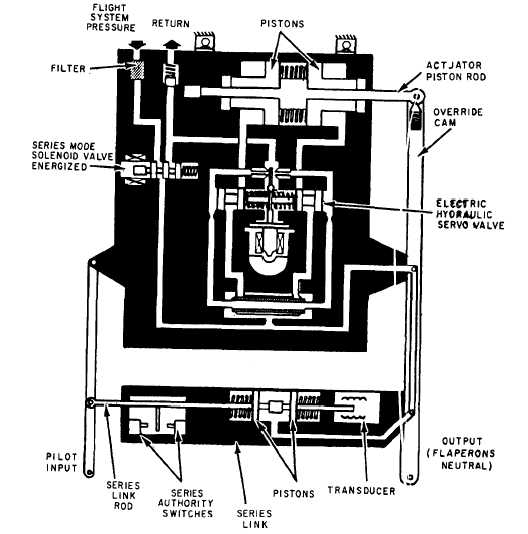
from the automatic flight control system cause the
electrohydraulic servo valve to differ the pressures in
the end chambers. The signal provides the working
force for the actuator. The actuator piston rod drives
the output lever.
Pressure at the series link
compresses a lock spring, unlocking the series link.
The actuator can stroke the pilot-commanded piston.
When the pilot moves the input link, relative motion
between input and output causes the transducer to
send a signal to the AFCS amplifier. The signal
combines with other flight stability signals, and the
resultant signal operates the servo valve. The AFCS
can be overridden by the pilot applying a stick force
of 25 pounds.
SYSTEM ACTUATORS—The flaperon system
actuators directly control the flalperon movement in
response to mechanical movement from the autopilot
actuator.
The actuator (fig. 9-1 2) consists of two
tandem-mounted power pistons and a power valve
shuttle. Mechanical inputs are introduced through the
load-relief (safety) bungee and the valve input lever to
the power valve shuttle portion of the actuator. The
inputs cause a valve error and the porting of hydraulic
pressure to the power pistons. As the flaperon moves,
mechanical linkage attached to the actuator tends to
null this valve error, The power valve shuttle returns
to neutral.
The flaperons remain in the selected
position until new mechanical inputs are received
from the pilot or the AFCS.
Figure 9-13.—Flaperon autopilot actuator.
9-15