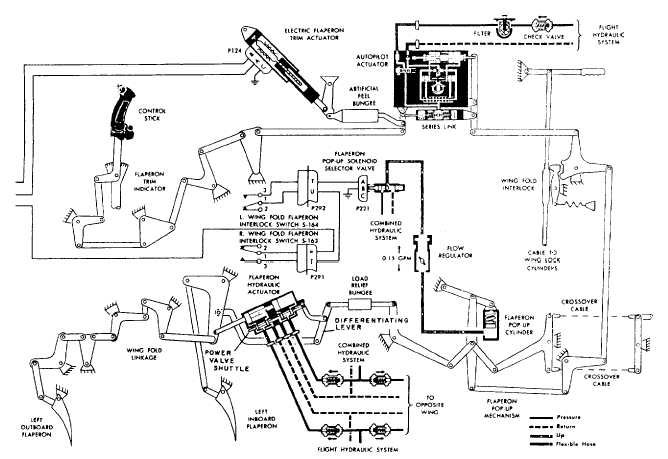
Figure 9-12 illustrates a representative flaperon
control system.
The flaperon autopilot actuator is
powered by the flight hydraulic system and transmits
mechanical movement to the flaperon power
actuators. The flaperon power actuators are tandem
type and powered by the combined and flight
hydraulic systems. They are capable of operating on
only one system if one system should fail.
The artificial-feel bungee provides an initial
control stick preload and increased force feel over the
full range of stick displacement. The electro-
mechanical actuator provides lateral trim, which
varies the neutral position of the artificial-feel
bungee. Trim is set by the switch on the control stick
grip. The pilot may read the mechanical flaperon trim
indicator on the control stick. See figure 9-10.
AUTOPILOT ACTUATOR.—The flaperon
autopilot actuator (figs. 9-12 and 9-13) contains an
electrohydraulic servo valve, actuator pistons,
solenoid valve, transducer, series link, and series-link
rod. It indirectly controls flaperon movement in
response to mechanical movements from the pilot. It
receives electrical inputs from the automatic flight
control system.
The actuator can operate in two
modes—manual or series.
In manual mode, the solenoid valve is de-energized
and no fluid is ported to any part of the actuator. The
actuator piston rod is free to idle. The series-link
cylinder acts as a rigid link that transfers input lever
motion to the output lever.
In series mode, the solenoid valve energizes and
ports pressure to the servo valve. Pressure from the
servo valve drives the actuator pistons together. This
pressure causes the pistons and the rod to act as one
piece. When the servo valve is at null, pressures in
the piston end chambers are equal. Electrical signals
Figure 9-12.—Flaperon control system.
9-14