
Foilborne Control System
The foilborne control system (FBCS) controls the
PHM during foilborne operations and during
transitions between foilborne and hullborne
operations. The FBCS consists of the following
equipment and systems:
1. Automatic control system (ACS)
2. Ready and warning system
3. Heading hold system
4. Foilborne throttle system
5. Forward and aft hydrofoils
6. Bow doors
The FBCS also monitors several critical
parameters of the foilborne system and provides
visual (and some audible) warnings of unsatisfactory
conditions. A self-test feature is available in most
sections of the FBCS. The major systems of the FBCS
that allow the PHM helmsman to monitor and control
foilborne operations are the ACS, the FECS, and the
FPCS. In the following paragraphs, we will take a
look at some examples of how these systems work.
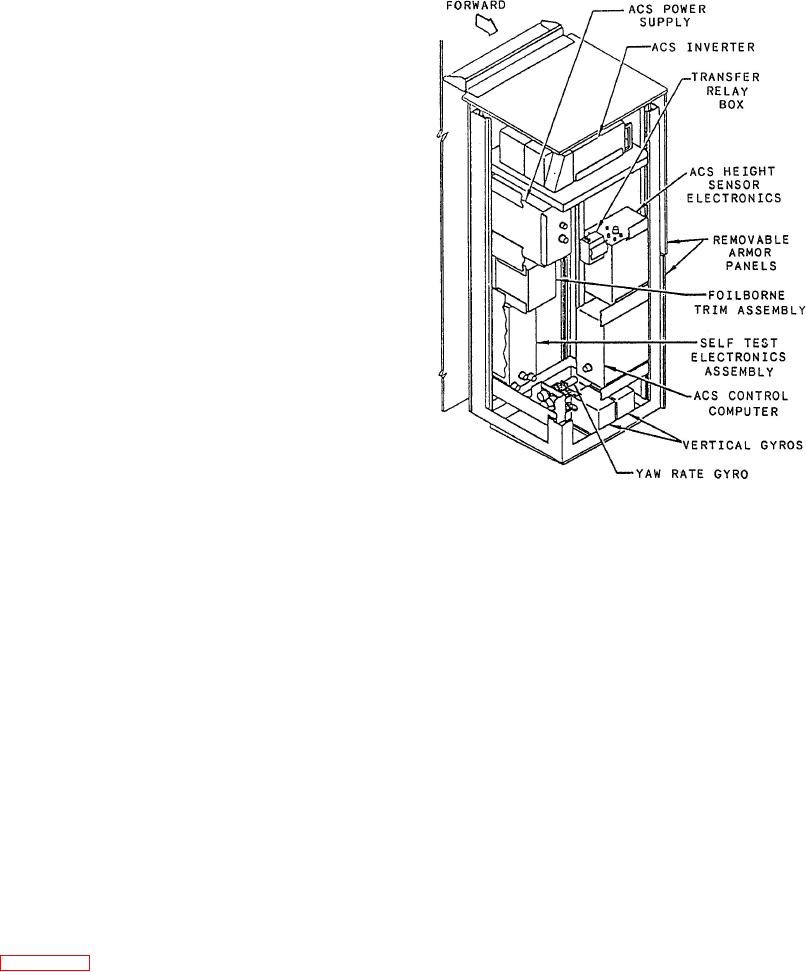
AUTOMATIC CONTROL SYSTEM. The ACS
controls the PHM during takeoff, landing, and all
foilborne operations. By automatically y positioning
the foilborne control surfaces, such as the forward
Figure 6-26.-Ship control electronics
flap, port and starboard flaps, and forward strut, in
installation showing ACS.
response to sensed ship motion and manual
commands from the helm, the ACS provides attitude
assembly input is 115 V ac, 400 Hz from either the
control, stability, and operation in rough water. The
ACS inverter, which is powered by +28 V dc (from
ACS also provides a self-test capability to allow the
two dc panels for redundancy) or from ship's 115 V
operator to perform system operational tests and
ac, 400 Hz through an isolation transformer. The +28
fault isolation procedures.
V dc is the system's primary source with the ship's
115 V ac as the backup source. Circuits within the
The heart of the ACS is the control computer
ACS power supply assembly monitor the incoming
that receives command inputs and sensor inputs,
power at the changeover relay and provide for
performs the necessary logic, and processes the
switching from primary to backup power when a loss
proper control signals to the proper control surfaces.
of primary power occurs.
It also receives feedback signals from the position
transducer in the control surface actuators.
Let's look at how this system works. Once the
Command inputs consist of heading change (turn)
helmsman sets the foil depth level command, the ACS
signals from the helm and foil depth command
maintains the appropriate depth during all ship
signals from the ACS control panel assembly. Sensor
maneuvers and throughout all sea conditions. As the
inputs are from attitude sensors (gyros), foil depth
helmsman rotates the helm for a heading change, the
sensors (height sensors), and heave sensors
ACS adjusts the flaps and forward strut for a
coordinated turn. When the helmsman adjusts the
foilborne throttle to control the ship's speed, the ACS
The ACS electrical power assembly consists of
accommodates the resulting hydrodynamic forces
an ACS power supply assembly, an ACS inverter, a
that change during the ship's change in speed by
dc line contactor, an ac line contactor, an isolation
adjusting the ship's pitch angle and the foil's angle of
transformer, and blocking diodes. As shown in
attack to maintain the required lift. The helmsman
figure 6-26, these components are all mounted to
can set the ACS MODE switch at the helm station to
the top shelf of the ship control electronics
STRUT
STEERING.
This
will
activate
installation.
The ACS power supply