
Figure 7-57.-Strap-down inertial navigation system, block diagram.
Figure 7-56 shows the relationship of the
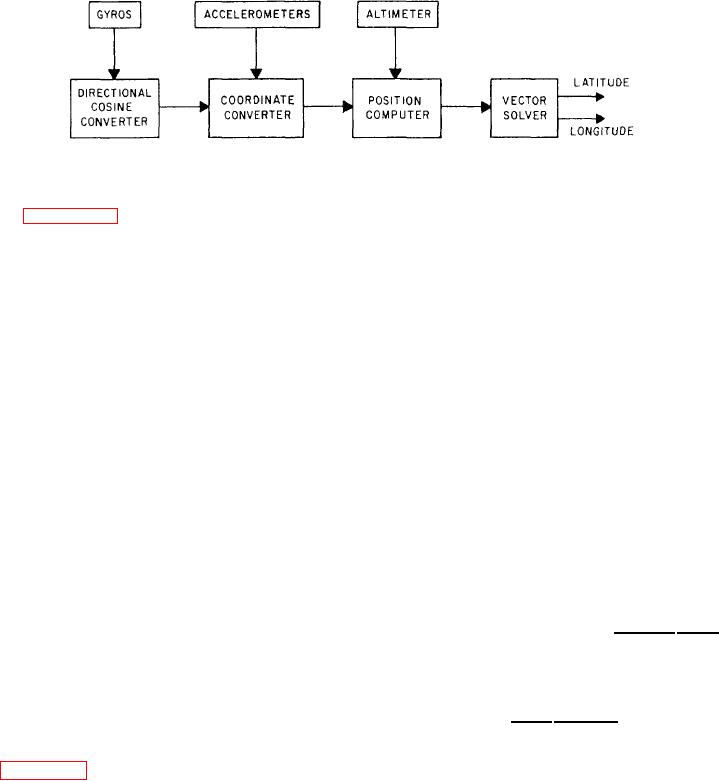
accepts inertial acceleration and altitude informa-
tion to develop Cartesian coordinates representing
accelerometers and gyros as the platform moves
the vehicle's position in inertial space. These
over the surface of the earth. When the platform
vectors then go to the vector solver, where they
is aligned at the equator and then moves north,
the gyros maintain their position in inertial space.
The accelerometers remain in a plane tangent to
longitude.
To accomplish strap-down system alignment,
the earth's surface at all times.
The main advantage of this system is that the
you must supply the directional cosines of the
vehicle frame to the computer. The vehicle
gyros are not torqued. Therefore, scaling of the
gyros is not critical.
requires no physical orientation.
The major disadvantage is economy. The
HYBRID INERTIAL
system requires a high degree of accuracy to
NAVIGATION SYSTEMS
position the latitude and longitude gimbals. The
semianalytic system requires much less precision
The hybrid system is a combination of
to achieve similar accuracy; therefore, it costs less.
inertial navigation system and some other type of
navigation system. The other navigation system
Strap-Down Inertial Navigation System
is for updating or improving the accuracy of the
In the strap-down system, the gyros and
inertial navigation system. In other words, the
hybrid inertial system combines two navigation
accelerometers mount directly to the frame of the
vehicle. Its principal use is in ballistic missiles and
systems so that the good characteristics of both
spacecraft. This type of system can be mechanized
are maintained.
for use in aircraft. However, the present state of
There are two types of updating processes used
in hybrid systems. One type is the damping effect,
technology makes it more feasible to use one of
which compares the inertial ground velocities with
the other type of systems for aircraft use.
The strap-down system requires complex
the ground velocities of some other system. The
system uses the error, or difference between the
digital computers; analog computers are not
two velocities, to damp out platform errors. The
accurate enough for use in this system. The
other type is the reset method. This method
computer in the strap-down system replaces the
gimbal structure as the gimbal structure replaced
ignores the orientation of the platform and merely
resets the position of the velocity shafts
the physical length of the Schuler pendulum.
periodically.
Figure 7-57 shows a simplified block diagram of
a strap-down inertial navigation system.
In the strap-down system, the gyros provide
angular rates, which the system converts to
As you learned earlier in this chapter,
directional cosines (for example, space vectors).
variation and deviation affect the accuracy of a
The strap-down uses these signals to determine
magnetic compass. Variation is a natural
vehicle attitude about an inertial frame of
phenomenon whose magnetic strength varies in
reference. The coordinate converter, using inputs
intensity throughout the world. Variation is
from the accelerometers and the directional cosine
marked on navigation maps and is corrected for
converter, determines accelerations along the
inertial reference axes. The position converter
by the pilot. You can consider deviation as