
To this point, a north-pointing inertial system
has been discussed. A disadvantage of the north-
pointing system is that it cannot operate in the
polar regions; it must always be physically pointed
north. If the system flies directly over the pole,
it must rotate 1800 to again be pointing north.
This rotation would not be physically possible
because of the extremely high torquing rates
necessary. Most north-pointing inertial systems
Figure 7-52.-Typical leveling loop.
cannot operate within several hundred miles of
the poles due to stress on the system components.
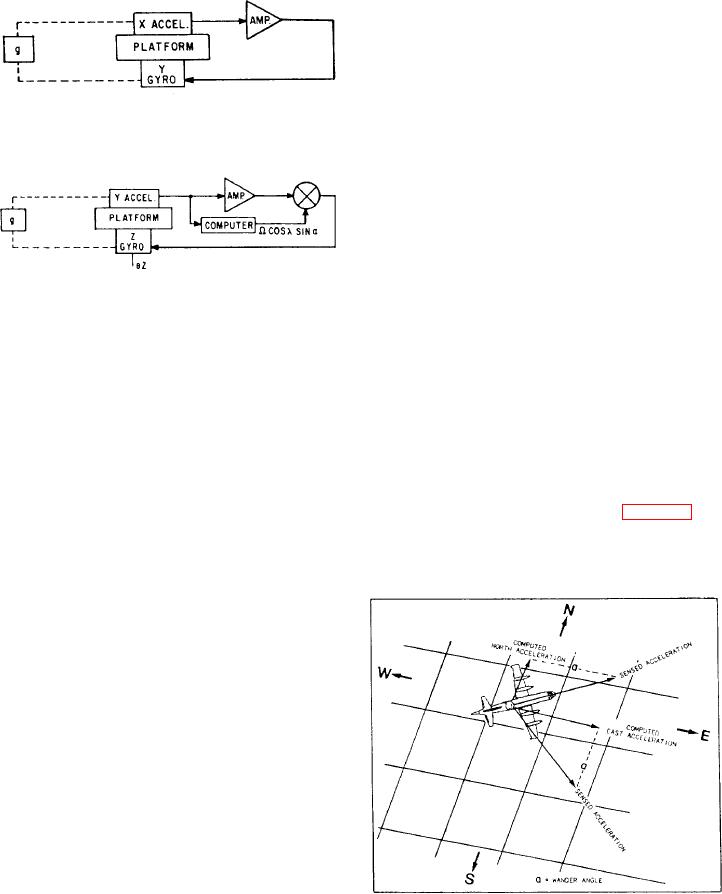
Wander Azimuth
The wander-azimuth inertial system solves the
problems of operating an inertial system at the
poles. The fundamentals of a wander-azimuth
system are the same as a north-pointing system.
Figure 7-53.-Typical heading alignment loop.
During the gyrocompassing mode, the system
allows the platform to take an arbitrary angle
(wander angle) with respect to true north.
In a north seeking platform, the system uses
As previously mentioned, the platform is
the earth's rotation to align the platform to true
leveled; but, the accelerometer outputs are now
north. It accomplishes this by using the output
supplying torquing signals to both gyros. This
of the y accelerometer. The system applies this
action compensates for the earth's rotation (this
output to the torquing coils of the z (azimuth) and
signal was sent to x gyro only in the north-pointing
the x (east) gyros. At the beginning of the gyro-
system). Eventually, the correct earth rate torqu-
compass phase (after the platform is leveled), the
ing signals maintain the platform level. The com-
stable element is torqued in azimuth. This nulls
puter then uses the ratio of earth rate compensa-
out the residual east gyro torquing rate. If the
tion to compute the wander angle (fig. 7-54).
stable element is not aligned to true north now,
As the wander-azimuth system navigates
it begins to tilt due to precession of the gyros. The
around the earth, the wander angle (with respect
y accelerometer senses deviation of the stable
element from level because of gravity. The
output of the accelerometer then torques the x
gyro until the stable element is level. At the same
time, the output signal also torques the z gyro in
azimuth. The process continues until the stable
element aligns to true north.
Once the platform is aligned, the operator
switches the system from the alignment phase
to the navigation phase of operation. In the
navigation phase, the stable element would
maintain an orientation about free space if not
for corrections supplied by the computer. The
computer maintains the stable element level with
respect to the earth and oriented to true north.
If not, the accelerometers sense gravity in
addition to movement of the aircraft. Coriolis,
centripetal, and earth rate corrections are
computed and used to hold the stable element level
and aligned to true north. In the navigation phase
of operation, the orientation to true north is
dependent on the original aligned position and the
Figure 7-54.-Wander angle.
computed corrections.