
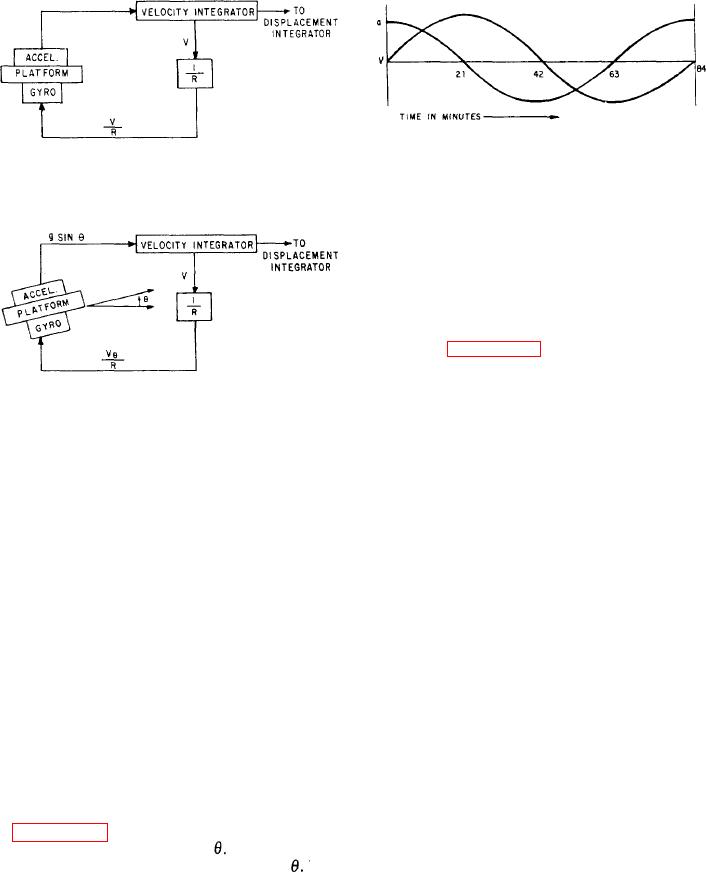
Figure 7-51.-Schuler tuning--acceleration errors versus
velocity errors.
Figure 7-49.-Simplified Schuler-tuned loop, platform level.
to now sense a gravity component of the opposite
polarity. This signal causes the velocity signal to
decrease to zero. The velocity signal now builds
up in the opposite direction and precesses the
platform in a counterclockwise direction. The
oscillation set up by this mechanization has a
period of 84 minutes, equal to that of the Schuler
pendulum. Figure 7-51 shows the buildup and
decay of acceleration and velocity errors as a result
of such errors as just described.
Figure 7-50.-Simplified Schuler-tuned loop, platform
unlevel.
ALIGNMENT
Inertial navigation depends on the integration
The torque causes the platform to precess about
of acceleration to obtain velocity and position.
the earth`s surface. This precession equals the rate
In any integration process, the system must first
the platform is being transported over the surface.
know the initial conditions. In this case the
This maintains the platform normal to the local
initial conditions are velocity and position. The
vertical.
accuracy in solving the navigation problem
There are two such loops in an inertial
depends greatly upon the accuracy of the initial
navigation system, one for the north and the other
conditions. Therefore, system alignment is of
for the east. The accelerometer in the north loop
paramount importance.
senses north-south accelerations, yet the gyro in
System alignment consists of creating a
the north loop senses east-west angular rates. That
coincidence between the platform axes and the
is, the vehicle's angular movements about the east-
computer axes. This can be done by rotating either
west axis.
or both systems. There are two general methods
By convention, we name accelerometers and
of accomplishing this condition.
gyros according to the direction of their sensitive
or input axis. The inertial or Schuler loop takes
1. The system is slaved to an external
the name of its accelerometer. The north loop
reference source.
contains the north accelerometer and the east
2. The system may have the built-in capability
gyro. The east loop contains the east acceler-
to sense misalignment and correct itself.
ometer and the north gyro.
With the platform initially unlevel, as shown
Of course, combinations of both these methods
in figure 7-50, the accelerometer senses a
can be, and often are, used.
component of gravity, g sin . This signal is
External references take three basic forms--
integrated, resulting in the velocity signal V . The
terrestrial, celestial, and inertial. The terrestrial
velocity signal then causes the gyro to precess in
system uses surveyed lines, bench marks, plumb
a clockwise direction. When the accelerometer is
bobs, and bubble levels. These methods result in
positioned to sense zero gravity, the velocity
level accuracies of about 10 seconds of arc and
output continues to torque the platform in a
heading accuracies to 3 minutes of arc. Celestial
clockwise direction. This causes the accelerometer
information from star trackers and radio sextants