
leveling gimbal. This gimbal is free to move in
a roll direction. Mechanical stops also restrict
the freedom of the leveling gimbal to 82,
preventing gimbal lock. These stops also prevent
the inversion of the leveling and inner roll
gimbal during gyroscope rotor coastdown after
system shutdown.
The outer roll gimbal is the outermost gimbal
for both the vertical and directional gyroscopes.
Pitch control transmitters detect pitch movement
of the outer roll gimbal about the vertical
gyroscope pitch gimbal. The outer roll control
transmitter and directional gyroscope control
transmitter mount between the outer roll gimbal
and gyroscope case (frame). However, they mount
at opposite ends. They sense roll movement of the
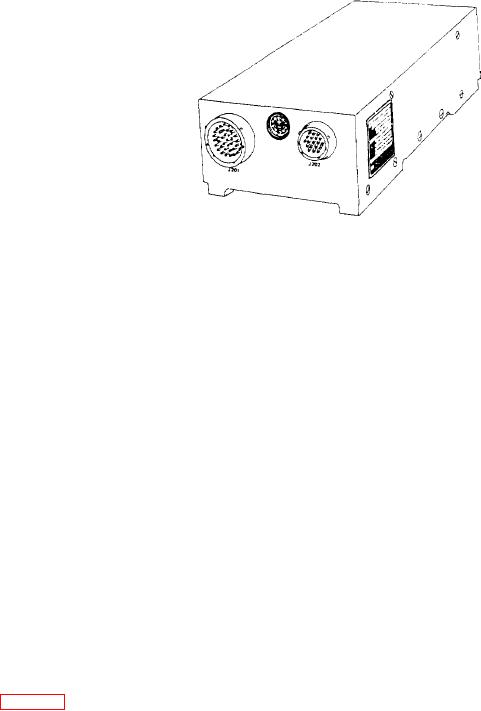
Figure 7-22.-Amplifier power supply.
aircraft (and frame) about the outer roll gimbal.
The azimuth gimbal may settle at any random
heading during power application. Therefore, you
The amplifier power supply provides the timing,
must slave the directional gyroscope's initial
switching, and voltages required for the start
azimuth signal to the flux valve. Also, you can
cycle; erection voltage control during system
correct it manually to a known magnetic heading.
operation; monitoring roll and pitch signals and
You must do this so the azimuth signal reflects
the neutral power lead of the vertical gyroscope
actual aircraft heading. The two azimuth control
motor; and the roll, pitch, and leveling amplifiers
transmitters, between the azimuth gimbal and the
required for control of the displacement gyroscope
directional gyroscope pitch gimbal, will then
gimbals.
furnish information on any further change in
Aircraft three-phase power goes to the
aircraft heading.
amplifier power supply. It then routes through the
The displacement gyroscope incorporates
ac power filter. The filtered three-phase power
snubbers. They maintain the approximate normal
then goes to other system components. A power
position of the outer roll gimbal and the
directional gyroscope pitch gimbal when power
supply connected to all three legs of the three-
phase power provides 28-volt dc, which goes to
is removed. Upon application of power, the
snubbers energize, removing their snubbing
a filter. System components use both filtered and
unfiltered dc.
action. The motor-generator and gear assemblies
that drive the gyroscope gimbals have enough
The second power supply is a three-section
power to override the snubbing action should a
supply. Each section is independent of the other
and supplies 95 volts dc. The dc outputs connect
snubber failure occur.
to various control relays within the amplifier
Amplifier Power Supply
power supply.
The output from the displacement gyroscope
The amplifier power supply (fig. 7-22) contains
photoelectric pickoff is a dc voltage. A leveling
modulator converts it to a 400-hertz ac voltage.
the following components:
The amplitude and phase of the modulator out-
An ac and a dc power filter
put depends on the amplitude and polarity of the
dc voltage from the photoelectric pickoff. The
Two power supply modules
400-hertz ac voltage goes to the leveling amplifier;
A roll driver amplifier
then the amplified signal goes to the directional
gyroscope leveling torquer control winding.
Roll, pitch, and leveling servo amplifiers
Roll and pitch error signals from the displace-
A leveling modulator
ment gyroscope are amplified by the roll and
pitch amplifiers. After amplification, the signals
A servo failure monitor module
go to the displacement gyroscope for application
Two thermal relays
to the roll and pitch motor-generator control
windings. The roll and pitch motor-generators
Ten control relays